Informationen über globales Planen
Vorgehensweise beim globalen Planen
Bei der APS-Planung im globalen Modus werden folgende Schritte ausgeführt:
- Es wird eine Verbindung zu allen Standorten hergestellt, die in der Maske APS-Standorte und Alternativen verwalten definiert sind. Die Planer-Datenbanken aller Standorte sind dann gesperrt. Auf keinem Standort kann nun das ATP/CTP-Verfahren oder die APS-Planung durchgeführt werden, solange die globale Planung andauert.
- Die Standortprioritäten werden ausgewertet und dann wird die Planung auf dem Standort mit der höchsten Priorität gestartet (Standort mit der niedrigsten Prioritätszahl).
- Das System entfernt alle Bedarfe am Standort und plant diese neu. Umlageraufträge werden für alle auf einem Remote-Standort verfügbaren Komponenten geplant.
Weitere Informationen über den Planungsprozess an einem bestimmten Standort finden Sie unter Informationen über den Planungsprozess.
- Das System startet die Planung des in der Prioritätshierarchie folgenden Standortes.
- Wenn das System die erneute Planung aller Standorte abgeschlossen hat, ist die globale Planung beendet und die Sperrung der Planer-Datenbanken wird aufgehoben. Alle Transaktionen, die an den einzelnen Standorten in SyteLine eingegeben wurden, während der Planungsprozess durchgeführt wurde und die Planer-Datenbanken gesperrt waren, werden jetzt inkrementell in die Planung eingegeben.
Wenn während der globalen APS-Planung oder der inkrementellen Planungsaktivität ein Teil eine Komponente eines anderen Standortes benötigt (d. h. bei Inter-Standort-Umlagerungen), plant das System Umlageraufträge folgendermaßen:
- Das System kontaktiert den Zugangsstandort, an dem das Remote-Teil gefertigt wird (basierend auf dem Feld Zugangsstandort im Teiledatensatz).
- Es plant das Teil in einer Testkopie der Planer-Datenbank des Zugangsstandortes (unter Berücksichtigung der in der Maske Inter-Standort-Parameter festgelegten Transit-Zeit).
- Es plant die Komponenten in der Planer-Produktionsdatenbank des Zugangsstandortes und erstellt einen geplanten Umlagerbedarfsauftrag.
- Das System erstellt entsprechend einen geplanten Umlagerauftrag für Zugang auf dem Standort, der die Remote-Komponente benötigt.
Wenn die APS-Planung keine Verbindung zum Zugangsstandort herstellen kann (weil die Planer-Datenbank des Standortes heruntergefahren ist, Netzwerkprobleme bestehen usw.), bestimmt sie mithilfe des Zeitbedarf für das Teil und der in der Maske Inter-Standort-Parameter festgelegten Transit-Zeit die voraussichtliche Verfügbarkeit der einzelnen Remote-Komponenten.
Umlageraufträge können in Abhängigkeit von den Komponentenanforderungen zusätzliche Remote-Aufträge automatisch generieren. Wenn beispielsweise Standort A eine auf Standort B produzierte Komponente benötigt und diese wiederum eine Komponente benötigt, die auf Standort C produziert wird, plant die APS-Planung den Bedarfsumlagerauftrag auf Standort C automatisch.
Wenn ein Umlagerauftrag für Zugang von einem Bedarfsauftrag generiert wurde, kann kein weiterer Bedarfsauftrag den Bestand verwenden, der von diesem Umlagerauftrag erstellt wurde. Überschüssiger Bestand jedoch, der aufgrund von Mindestchargengrößen generiert wurde, steht auf dem Standort für Zugang weiterhin für die Bedarfszuteilung zur Verfügung.
Die APS-Planung erstellt geplante Umlageraufträge. Diese müssen über die Maske Planungsdetail, Materialplanungs-Workbench oder Details standortinterne Umlagerung - Umlagerauftrag bestätigen als tatsächliche Umlageraufträge bestätigt werden.
Informationen über die Standortrekursion in Stücklisten
Das System unterstützt keine Rekursion von Standort zu Standort für einzelne Auftragspositionen. Das heißt, ein Teil auf einem Standort kann keine Komponente eines anderen Standortes abrufen, der in der Stückliste des Teiles als höherer Zugangsstandort aufgeführt ist. Das folgende Beispiel veranschaulicht die Standortrekursion:
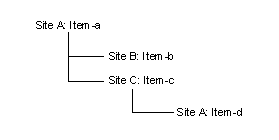
In diesem Beispiel wird Teil d an Standort A gefertigt, der bereits in einem übergeordneten Knoten in der Stückliste angegeben wird, so dass das System den Plan an Standort A bereits ausgeführt hat. In dieser Situation wird Teil d NICHT an Standort A geplant. Stattdessen erstellt das System einen geplanten Auftrag für das Teil, wobei der Standardzeitbedarf für das Teil verwendet wird.
In der Maske Bedarfsdetails - APS wird dieser geplante Auftrag mit der Bezeichnung „Standortrekursion - Neuen Zugang verwenden“ versehen.
In der Maske Planungsdetail wird diesem geplanten Auftrag die Ausnahmemeldung "Standortrekursion - Zeitbedarf verwendet" hinzugefügt. Sie sollten diese geplanten Aufträge in Umlageraufträge umwandeln.
Informationen über die Replizierung von Umlageraufträgen
Für Zugangsstandorte, die nicht in der Maske Planungsparameter definiert sind, müssen Sie Replizierungsregeln festlegen, damit der Zugangsstandort Bedarfe erkennt, die von dem Standort kommen, der die APS-Planung gestartet hat.
Weitere Informationen erhalten Sie unter Einrichten der Replizierung von geplanten Umlageraufträgen.